Apresentação
Esta página é destinada à postagem dos exercícios do tutorial Introdução ao processamento digital de imagens com OpenCV, desenvolvido como roteiro para a disciplina de PROCESSAMENTO DIGITAL DE IMAGENS (DCA0445), ministrada pelo Professor Dr. Agostinho Brito Jr., do Departamento de Engenharia de Computação e Automação da Universidade Federal do Rio Grande do Norte - UFRN, no semestre de 2016.2.
Os programas foram implementados em liguagem C++, utilizando a biblioteca OpenCV versão 2.4.13 cuja instalação foi realizada utilizando o tutorial Instalando OpenCV no Linux sem dores de cabeça.
|
Tip
|
Optou-se pela ferramenta CMake para a compilação dos códigos. |
3. Manipulação de pixels de uma imagem
Exercício 3.2.a - Negativo de uma região da imagem
O exercício 3.2.a pede para implementar um programa (regions.cpp) que solicite ao usuário as coordenadas de dois pontos P1 e P2 localizados dentro dos limites do tamanho da imagem que lhe for fornecida. A região definida pelo retângulo de vértices opostos definidos pelos pontos P1 e P2 será exibida com o negativo da imagem na região correspondente.
A implementação proposta recebe o nome do arquivo da imagem no parâmetro ''argv[1]'', abre-a, obtém as coordenadas os pontos P1 e P2 e procede à manipulação dos pixels da região delimitada pelos dois pontos informados. Para cada pixel calcula-se o seu inverso, p(x,y) = 255-p(x,y), onde p(x,y) refere-se ao pixel na linha x, coluna y. A listagem abaixo mostra o código que foi implementado.
#include <iostream>
#include <highgui.h>
#include <cv.h>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
Mat image;
Vec3b val;
int x1, x2, y1, y2, m;
image= imread(argv[1], CV_LOAD_IMAGE_GRAYSCALE);
if(!image.data) {
cout << "Falha ao abrir " << argv[1] << "..." << endl;
waitKey();
}
cout<<"Informe as coordenadas de P1 (x,y): ";
cin>>x1>>y1;
cout<<"Informe as coordenadas de P2 (x,y): ";
cin>>x2>>y2;
if(x1 > x2) {
m = x2;
x2 = x1;
x1 = m;
}
if(y1 > y2) {
m = y2;
y2 = y1;
y1 = m;
}
for(int i=x1; i < x2; i++){
for(int j=y1; j < y2; j++){
image.at<uchar>(i,j) -= -255;
}
}
namedWindow("window", WINDOW_AUTOSIZE);
imshow("window", image);
imwrite("inverted.png", image);
waitKey(3. );
return 0;
}Um teste de execução foi realizado com as coordenadas P1 (10, 50) e P2 (150, 80). O resultado pode ser observado na imagem abaixo.

Exercício 3.2.b - Trocar regiões da imagem
O exercício 3.2.b pede para implementar um programa (trocaregioes.cpp) que deverá trocar (reposicionar) aleatoriamente regiões da imagem, formando uma espécie de quebra-cabeças.
A implementação realizada obtém o nome do arquivo da imagem do parâmetro ''argv[1]'' fornecido na linha de comando, abre-a, randomiza um percentual da altura e da largura para a realização da separação das regiões. A listagem abaixo mostra o código que foi implementado.
#include <iostream>
#include <cv.h>
#include <highgui.h>
#include <stdlib.h>
#include <time.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv){
Mat image;
int width, height;
image = imread(argv[1], CV_LOAD_IMAGE_GRAYSCALE);
if (!image.data) {
cout << "Falha do abrir " << argv[1] << ", verifique o caminho para o aquivo." << endl;
waitKey();
}
namedWindow("window",WINDOW_AUTOSIZE);
width=image.size().width;
cout<<"Largura: " << width << endl;
height=image.size().height;
cout<<"Altura: " << height << endl;
Mat swapimage(height, width, CV_LOAD_IMAGE_GRAYSCALE);
srand((unsigned) time(NULL));
int point = rand()%(height < width ? height : width);
for (int i = 0; i < height; i++) {
for (int j = 0; j < width; j++) {
swapimage.at<uchar>(i,j) = image.at<uchar>(((i+point) % height), ((j+point) % width));
}
}
imshow("window", swapimage);
imwrite("swapped.png",swapimage);
waitKey();
return 0;
}Abaixo temos a imagem salva após a troca de regiões.

4. Preenchendo regiões
Exercício 4.2.a - Rotulação com mais de 255 objetos
O exercício 4.2.a pede para que se identifique a situação em que ocorre problemas no processo de rotulação no programa labeling.cpp e apresentar uma solução para o problema de rotulação de mais regiões que a quantidade de valores disponível.
O programa labeling.cpp fornecido rotula cada objeto encontrado com um tom de cinza. Os computadores representam intensidade de brilho em valores que variam entre 0 e 255. Portanto, quando há mais do que 255 elementos a representar, o algoritmo fica comprometido pela falta de níveis disponíveis para rotulação dos objetos restantes.
A solução proposta é a simples modulação da variável bubbles, que conta a quantidade de bolhas, pela quantidade de níveis possíveis, 255. Assim a contagem não é alterada e os valores de nível de cinza são atribuídos sem os problemas antes apresentados. O trecho de código abaixo implementa a solução proposta:
floodFill(image, p, bubbles % 255);
Exercício 4.2.b - Contagem de bolhas
O exercício 4.2.b pede para que se aprimore o algoritmo de contagem apresentado (labeling.cpp) para identificar regiões com ou sem buracos internos que existam na cena.
A solução proposta é a simples modulação da variável bubbles, que conta a quantidade de bolhas, pela quantidade de níveis possíveis, 255. Assim a contagem não é alterada e os valores de nível de cinza são atribuídos sem os problemas antes apresentados. O trecho de código abaixo implementa a solução proposta:
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
int ORIGINAL_BGROUND = 0;
int EXPLORED_BGROUND = 150;
int ORIGINAL_BUBBLE = 255;
int EXPLORED_BUBBLE = 152;
Mat image, mask;
CvPoint point;
int width, height;
int bubbles=0, holes=0;
image = imread(argv[1], CV_LOAD_IMAGE_GRAYSCALE);
if(!image.data){
cout << "Falha ao carregar a imagem " << argv[1] << "." << endl;
return(-1);
}
width = image.size().width;
height = image.size().height;
// boder cleaning ----------------------------------------
int k = 0;
while (k < height) {
point.y = k;
point.x = 0;
if (image.at<uchar>(point) == ORIGINAL_BUBBLE) {
floodFill(image, point, ORIGINAL_BGROUND);
}
point.x = width-1;
if (image.at<uchar>(point) == ORIGINAL_BUBBLE) {
floodFill(image, point, ORIGINAL_BGROUND);
}
k++;
}
k = 1;
while (k < width-1) {
point.x = k;
point.y = 0;
if (image.at<uchar>(point) == ORIGINAL_BUBBLE) {
floodFill(image, point, ORIGINAL_BGROUND);
}
point.y = height-1;
if (image.at<uchar>(point) == ORIGINAL_BUBBLE) {
floodFill(image, point, ORIGINAL_BGROUND);
}
k++;
}
// counting bubbles ----------------------------------------
for(int i = 0; i < height; i++){
for(int j = 0; j < width; j++){
if (image.at<uchar>(i,j) == ORIGINAL_BUBBLE){
bubbles++;
point.x = j;
point.y = i;
floodFill(image, point, bubbles % 100);
}
}
}
// coloring the background ---------------------------------
point.x=0;
point.y=0;
floodFill(image, point, EXPLORED_BGROUND);
// counting the holes --------------------------------------
int previouspix;
for(int i = 0; i < height; i++){
for(int j = 0; j < width; j++){
if (image.at<uchar>(i,j) == ORIGINAL_BGROUND) {
previouspix = image.at<uchar>(i,j-1);
if (previouspix < 100) {
holes++;
point.x = j-1;
point.y = i;
floodFill(image, point, 255-previouspix);
}
point.x = j;
point.y = i;
floodFill(image, point, EXPLORED_BGROUND);
}
}
}
cout << "Bolhas solidas: "<< (bubbles - holes) <<"\n";
cout << "Bolhas vazadas: "<< holes <<"\n";
imshow("image", image);
imwrite("bubblefill.png", image);
waitKey();
return 0;
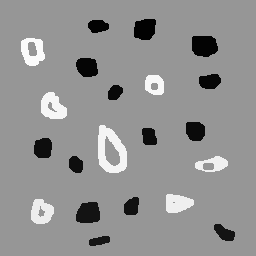
}Abaixo está mostrada a imagem salva após a contagem de bolhas, no caso, foram encontradas 21 bolhas sendo 7 delas vazadas.
5. Manipulação de histogramas
Exercício 5.2.a - Equalização do histograma
O exercício 5.2.a pede para que se implemente um programa (equalize.cpp) para equalizar o histograma para cada imagem capturada do vídeo de uma câmera que está conectada ao computador. É mostrado assim, duas janelas, sendo uma com imagens originais, e outra com as imagens contendo seu histograma já equalizado. As imagens são processadas em tons de cinza. A seguir está o código para esse programa, equalize.cpp.
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main(int argc, char** argv){
Mat image;
int width, height;
VideoCapture cap;
Mat histGray, histEqualized;
Mat imageEqualized;
int nbins = 64;
float range[] = {0, 256};
const float *histrange = { range };
bool uniform = true;
bool acummulate = false;
cap.open(0);
if(!cap.isOpened()){
cout << "cameras indisponiveis";
return -1;
}
width = cap.get(CV_CAP_PROP_FRAME_WIDTH);
height = cap.get(CV_CAP_PROP_FRAME_HEIGHT);
cout << "largura = " << width << endl;
cout << "altura = " << height << endl;
int histw = nbins, histh = nbins/2;
Mat histImgGray(histh, histw, CV_BGR2GRAY, Scalar(0,0,0));
Mat histImgEqualized(histh, histw, CV_BGR2GRAY, Scalar(0,0,0));
while(1){
cap >> image;
cvtColor(image, image, CV_BGR2GRAY);
calcHist(&image, 1, 0, Mat(), histGray, 1,
&nbins, &histrange,
uniform, acummulate);
normalize(histGray, histGray, 0, histImgGray.rows, NORM_MINMAX, -1, Mat());
histImgGray.setTo(Scalar(0));
equalizeHist(image, imageEqualized);
calcHist(&imageEqualized, 1, 0, Mat(), histEqualized, 1,
&nbins, &histrange,
uniform, acummulate);
normalize(histEqualized, histEqualized, 0, histImgEqualized.rows, NORM_MINMAX, -1, Mat());
histImgEqualized.setTo(Scalar(0));
for(int i=0; i<nbins; i++){
line(histImgGray, Point(i, histh),
Point(i, cvRound(histGray.at<float>(i))),
Scalar(255), 1, 8, 0);
line(histImgEqualized, Point(i, histh),
Point(i, cvRound(histEqualized.at<float>(i))),
Scalar(255), 1, 8, 0);
}
histImgGray.copyTo(image(Rect(0, 0,nbins, histh)));
histImgEqualized.copyTo(imageEqualized(Rect(0, 0,nbins, histh)));
imshow("image", image);
imshow("imageEqualized", imageEqualized);
if(waitKey(30) >= 0) break;
}
return 0;
}Cada pixel de uma imagem tem uma cor que foi produzida por uma combinação de cores primárias (vermelho, verde e azul, ou RGB). Cada uma dessas cores pode ter um brilho que varia de 0 a 255 em uma imagem digital com profundidade de bits de 8-bits. Um histograma RGB é produzido quando o computador varre a imagem em cada um desses valores de brilho RGB e conta quantos pixels há em cada nível de 0 a 255. Como o trabalho foi realizado com imagens processadas em tons de cinza, o histograma é apresentado de acordo com os níveis de cinza. Com o histograma calculado, é feito sua equalização.
Equalizar o histograma significa obter a máxima variância do histograma de uma imagem, obtendo assim uma imagem com o melhor contraste. O contraste é uma medida qualitativa e que está relacionada com a distribuição dos tons de cinza em uma imagem.
Para calcular o histograma foi utilizado a função calcHist. Foi calculado primeiramente o histograma para o vídeo contendo imagens originais. A variável que contém a matriz com as imagens originais se chama image, do tipo Mat. A variável que contém o histograma para as imagens originais se chama histGray, do tipo Mat. No algorítmo apresentado, a linha que corresponde ao que foi explicado anteriormente é a seguinte:
calcHist(&image, 1, 0, Mat(), histGray, 1, &nbins, &histrange, uniform, acummulate);
Já tendo em posse o histograma calculado, para realizar a equalização deste histograma foi utilizado a função equalizeHist. O primeiro parâmetro dessa função trata-se de uma variável do tipo Mat. Essa variável contém a matriz da imagem a ser equalizada. Já o segundo parâmetro trata-se do resultado, isto é, a imagem equalizada. No algorítmo apresentado, a linha que corresponde ao que foi explicado anteriormente é a seguinte:
equalizeHist(image, imageEqualized);
Após a equalização, é calculado o seu histograma:
calcHist(&imageEqualized, 1, 0, Mat(), histEqualized, 1, &nbins, &histrange, uniform, acummulate);
A variável histEqualized é do tipo Mat. Ela contém o histograma da imagem já equalizada.
Com a imagem equalizada e seu histograma calculado, é mostrado duas janelas para comparação. Uma janela com o nome image, que trata-se do vídeo original, e a outra janela com o nome imageEqualized, que trata-se do vídeo com as imagens equalizadas. As imagens são mostradas através da função imshow().
imshow("image", image);
imshow("imageEqualized", imageEqualized);
Abaixo temos as imagens original e equalizada, resultado do processamento.
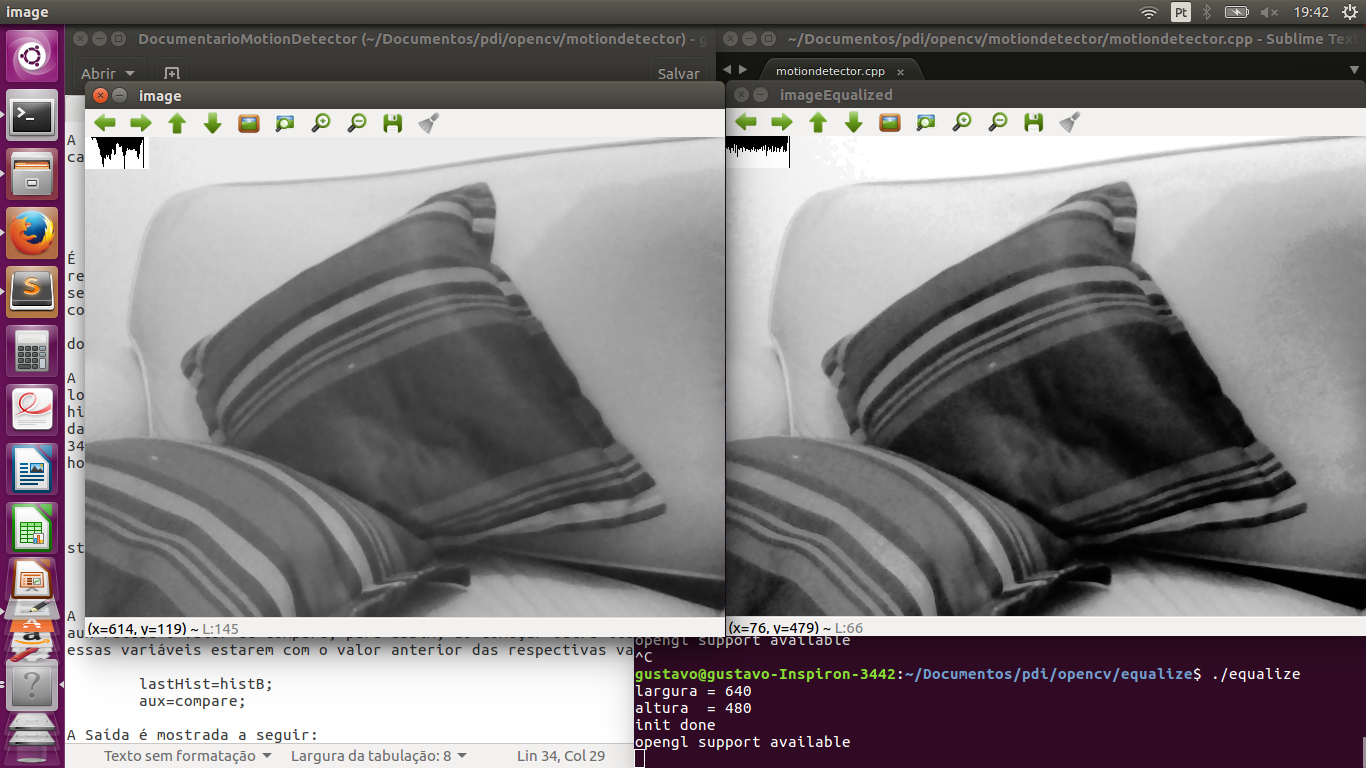
No canto superior esquerdo é mostrado o histograma da imagem. É possível perceber que a imagem equalizada apresenta um maior contraste.
Exercício 5.2.b - Detecção de movimento
O exercício 5.2.b pede para que se implemente um programa (motiondetector.cpp) para detectar movimento através de uma câmera conectada ao computador. Este algoritmo funciona comparando o histograma da imagem capturada com o último histograma calculado. Se a diferença ultrapassar um limiar pré-estabelecido, um alarme é ativado. A seguir está o código para esse programa.
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
const string currentDateTime() {
time_t now = time(0);
struct tm tstruct;
char buf[80];
tstruct = *localtime(&now);
strftime(buf, sizeof(buf), "%Y-%m-%d.%X", &tstruct);
return buf;
}
int main(int argc, char** argv){
Mat image;
int width, height;
VideoCapture cap;
vector<Mat> planes;
Mat histB;
int nbins = 64;
float range[] = {0, 256};
const float *histrange = { range };
bool uniform = true;
bool acummulate = false;
Mat lastHist;
double aux=0;
cap.open(0);
if(!cap.isOpened()){
cout << "cameras indisponiveis";
return -1;
}
width = cap.get(CV_CAP_PROP_FRAME_WIDTH);
height = cap.get(CV_CAP_PROP_FRAME_HEIGHT);
cout << "largura = " << width << endl;
cout << "altura = " << height << endl;
int histw = nbins, histh = nbins/2;
Mat histImgR(histh, histw, CV_8UC3, Scalar(0,0,0));
cap >> image;
split (image, planes);
calcHist(&planes[0], 1, 0, Mat(), lastHist, 1,
&nbins, &histrange,
uniform, acummulate);
while(1){
cap >> image;
split (image, planes);
calcHist(&planes[0], 1, 0, Mat(), histB, 1,
&nbins, &histrange,
uniform, acummulate);
normalize(histB, histB, 0, histImgR.rows, NORM_MINMAX, -1, Mat());
histImgR.setTo(Scalar(0));
for(int i=0; i<nbins; i++){
line(histImgR, Point(i, histh),
Point(i, cvRound(histB.at<float>(i))),
Scalar(255, 0, 0), 1, 8, 0);
}
double compare = compareHist(histB, lastHist, CV_COMP_INTERSECT);
//CV_COMP_INTERSECT
if(compare>(aux+34) || compare<(aux-34)){
cout << "Movimento detectado: " << currentDateTime() << std::endl;
cout<<endl;
}
histImgR.copyTo(image(Rect(0, 0,nbins, histh)));
imshow("image", image);
if(waitKey(30) >= 0) break;
lastHist=histB;
aux=compare;
}
return 0;
}Esse programa foi feito o calculando primeiramente o histograma para a primeira imagem capturada e salvando-o na variável chamada lastHist, do tipo Mat.
calcHist(&planes[0], 1, 0, Mat(), lastHist, 1, &nbins, &histrange, uniform, acummulate);
A seguir, em um loop infinito, é calculado o histograma da imagem capturada atual, salvando-o na variável histB, do tipo Mat.
calcHist(&planes[0], 1, 0, Mat(), histB, 1, &nbins, &histrange, uniform, acummulate);
É criado uma variável do tipo double chamada compare. Essa variável recebe o valor que a função compareHist retorna. A função compareHist serve para comparar dois histogramas. No caso do algoritmo em questão, compara o histB com lastHist.
double compare = compareHist(histB, lastHist, CV_COMP_INTERSECT);
A variável compare será calculada continuamente, para cada iteração do loop, sempre calculando a diferença entre o histograma atual e o histograma anterior. A variável aux serve para salvar o último valor da variável compare. Se a diferença entre compare e aux for maior que 34 ou menor que -34, é detectado o movimento e é salvado o dia e a hora do ocorrido.
if(compare>(aux+34) || compare<(aux-34)){
cout << "Movimento detectado: " << currentDateTime() << std::endl;
cout<<endl;
}
A função currentDateTime() serve para imprimir o dia e a hora atual.
const string currentDateTime() {
time_t now = time(0);
struct tm tstruct;
char buf[80];
tstruct = *localtime(&now);
strftime(buf, sizeof(buf), "%Y-%m-%d.%X", &tstruct);
return buf;
}
A variável lastHist, no final da iteração, recebe o valor de histB, e aux recebe o valor de compare, para assim, ao começar outra iteração, essas variáveis estarem com o valor anterior das respectivas variáveis.
lastHist=histB; aux=compare;
A saída é mostrada a seguir:
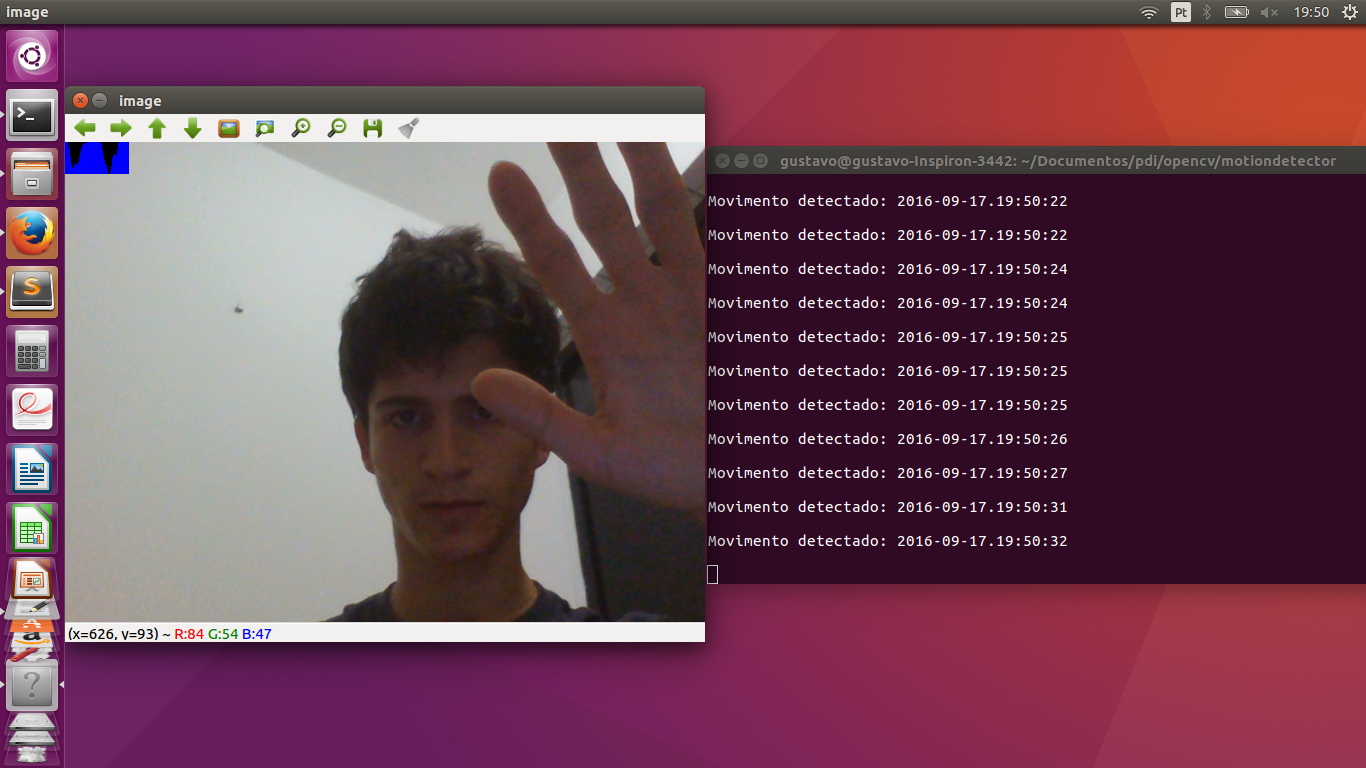
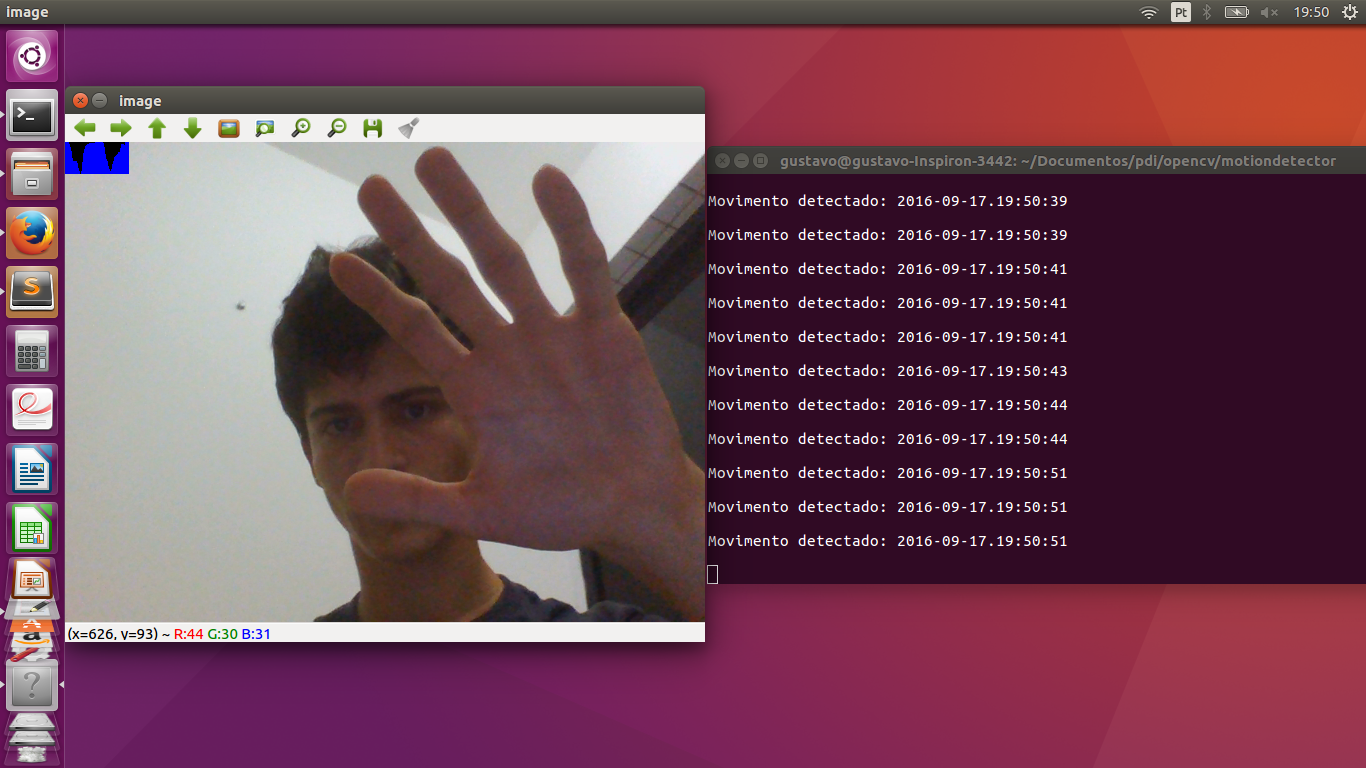
Ao movimentar a mão, o programa detecta o movimento e salva o dia e a hora do evento.
6. Filtragem no domínio espacial I
Exercício 6.2.a - Filtro laplaciano do gaussiano
O exercício 6.2.a pede para que, utilizando o programa exemplos/filtroespacial.cpp como referência, implemente um programa laplgauss.cpp que deverá acrescentar mais uma funcionalidade ao exemplo fornecido, permitindo que seja calculado o laplaciano do gaussiano das imagens capturadas. Ao fim, comparar o resultado desse filtro com a simples aplicação do filtro laplaciano.
#include <cstdio>
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
void printmask(Mat &m){
cout << "\nMascara atual\n";
for(int i=0; i<m.size().height; i++){
cout << "|\t";
for(int j=0; j<m.size().width; j++){
printf("%.2f\t", m.at<float>(i,j));
}
cout << "|\n";
}
cout << endl;
}
void print_menu(){
cout <<
"\nPressione a tecla correspondente ao filtro desejado: \n"
"c/C - Ativar/desativar modo modular\n"
"m/M - Filtro mediano\n"
"g/G - Filtro gaussano\n"
"v/V - Filtro vertical\n"
"h/H - Filtro horizontal\n"
"l/L - Filtro laplaciano\n"
"q/Q - Filtro laplaciano do gaussiano\n"
"[ESC] - Sair\n\n";
}
int main(int argvc, char** argv){
char const ESC_KEY = 27;
VideoCapture video;
video.open(0);
if (!video.isOpened()) {
return -1;
}
float average[] = {
1, 1, 1,
1, 1, 1,
1, 1, 1
};
Mat average_mask = Mat(3, 3, CV_32F, average);
average_mask = average_mask * (1/9.0);
float gauss[] = {
1, 2, 1,
2, 4, 2,
1, 2, 1
};
Mat gauss_mask = Mat(3, 3, CV_32F, gauss);
gauss_mask = gauss_mask * (1/16.0);
float horizontal[] = {
-1, 0, 1,
-2, 0, 2,
-1, 0, 1
};
Mat horizontal_mask = Mat(3, 3, CV_32F, horizontal);
float vertical[] = {
-1,-2,-1,
0, 0, 0,
1, 2, 1
};
Mat vertical_mask = Mat(3, 3, CV_32F, vertical);
float laplacian[]= {
0,-1, 0,
-1, 4,-1,
0,-1, 0,
};
Mat laplacian_mask = Mat(3, 3, CV_32F, laplacian);
Mat mask = average_mask;
Mat capture, frame, frame32f, frameFiltered, result;
int absolut_mode = true;
int additional_laplacian_step = false;
int key;
double width, height;
width = video.get(CV_CAP_PROP_FRAME_WIDTH);
height = video.get(CV_CAP_PROP_FRAME_HEIGHT);
cout << "largura=" << width << "\n";;
cout << "altura =" << height<< "\n";;
namedWindow("filtroespacial",1);
print_menu();
while (key != ESC_KEY) {
video >> capture;
// Manipulacoes do frame capturado
cvtColor(capture, frame, CV_BGR2GRAY);
flip(frame, frame, 1);
imshow("original", frame);
frame.convertTo(frame32f, CV_32F);
// Aplica o filtro espacial selecionado (mask)
filter2D(frame32f, frameFiltered, frame32f.depth(), mask, Point(1,1), 0);
if (additional_laplacian_step) {
filter2D( frameFiltered, frameFiltered, frame32f.depth(), laplacian_mask, Point(1,1), 0);
}
if (absolut_mode) {
frameFiltered = abs(frameFiltered);
}
frameFiltered.convertTo(result, CV_8U);
imshow("filtroespacial", result);
key = waitKey(10);
if (key == 'c' || key == 'C' ||
key == 'm' || key == 'M' ||
key == 'g' || key == 'G' ||
key == 'q' || key == 'Q' ||
key == 'h' || key == 'H' ||
key == 'v' || key == 'V' ||
key == 'l' || key == 'L') {
print_menu();
if (key == 'c' || key == 'C') {
absolut_mode = !absolut_mode;
cout << "Modo absoluto " << (absolut_mode ? "ativado" : "desativado") << endl;
} else if (key == 'm' || key == 'M') {
mask = average_mask;
additional_laplacian_step = false;
cout << "Filtro da media ativado." << endl;
} else if (key == 'g' || key == 'G') {
mask = gauss_mask;
additional_laplacian_step = false;
cout << "Filtro gaussiano ativado." << endl;
} else if (key == 'h' || key == 'H') {
mask = horizontal_mask;
additional_laplacian_step = false;
cout << "Filtro da horizontal ativado." << endl;
} else if (key == 'v' || key == 'V') {
mask = vertical_mask;
additional_laplacian_step = false;
cout << "Filtro da vertical ativado." << endl;
} else if (key == 'l' || key == 'L') {
mask = laplacian_mask;
additional_laplacian_step = false;
cout << "Filtro da laplaciano ativado." << endl;
} else if (key == 'q' || key == 'Q') {
mask = gauss_mask;
additional_laplacian_step = true;
cout << "Filtro laplaciano do gaussiano ativado." << endl;
}
printmask(mask);
}
}
return 0;
}Abaixo as imagens produzidas com o processamento da imagem original. Destacamos que a opção de valores absolutos não surte efeito quando estão ativos os filtros da média ou gaussiano.
7. Filtragem no domínio espacial II
Exercício 7.2.a - Efeito tiltshift estático
O exercício 7.2.a pede para que, tomando como base o programa addweighted.cpp, seja implementado um programa que simule o efeito de lentes tiltshift em imagens estáticas. Três ajustes devem ser providos na tela da interface:
-
um ajuste para regular a altura da região central que entrará em foco;
-
um ajuste para regular a força de decaimento da região borrada;
-
um ajuste para regular a posição vertical do centro da região que entrará em foco.
Finalizado o programa, a imagem produzida deverá ser salva em arquivo.
Exercício 7.2.b - Efeito tiltshift dinâmico
O exercício 7.2.b pede para que seja implementado um programa que simule o efeito de lentes tiltshift em video. Os mesmos outros requisitos do exercício anterior se aplicam.
8. Filtragem no domínio da frequência
Exercício 8.2 - Filtragem homomófica
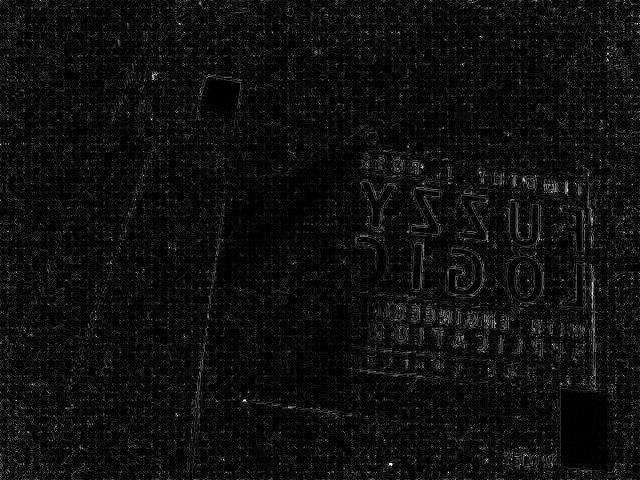
O exercício 8.2 pede para que se implemente um filtro homomórfico para melhorar imagens com iluminação irregular. A entrada do programa é uma imagem mal iluminada, e a saída é uma imagem com o filtro homomórfico aplicado e, como esperado, iluminação corrigida.
O filtro homomórfico atenua as frequências baixas, caracterísitica da iluminação e aplica um ganho às frequências altas. Para isso, é necessário separar a iluminância da reflectância. Essa filtragem se realiza, suscintamente, calculado o logarítmo da imagem, para assim, aplicar a Transformada Discreta de Fourier (Discrete Fourier Transform _ DFT) para, então, aplicar a filtragem homomórfica.
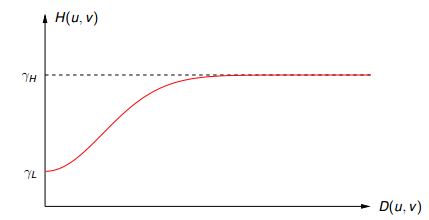
A função de transferência do filtro homomórfico é dada pela seguinte expressão:

onde, Gama_H é o limite superior da atenuação do filtro e Gama_L é o limite inferior. D0 é frequência de corte (cutoff) do filtro e D(u,v) é dado pela fórmula:

em que P e Q são as dimensões ajustadas (padded) da imagem.
O gráfico da função de transferência do filtro homomórfico se assemelha ao mostrado no gráfico abaixo:
Após a aplicação do filtro, calculou-se a Transformada Discreta Inversa de Fourier (Inverse Discrete Fourier Transform - IDFT), normalizou-se os pontos da imagem para valores de 0 a 1.
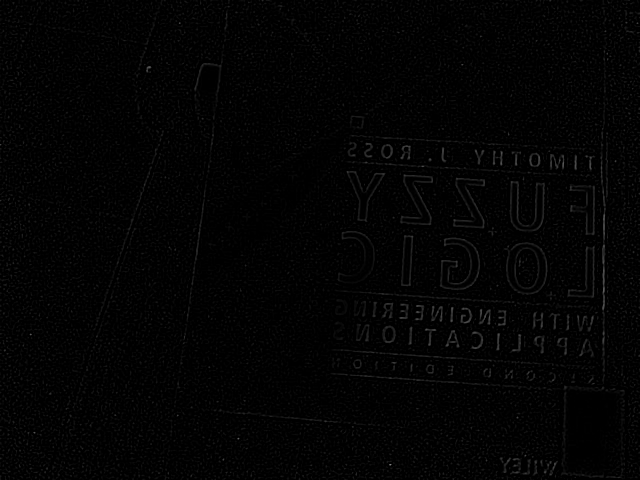
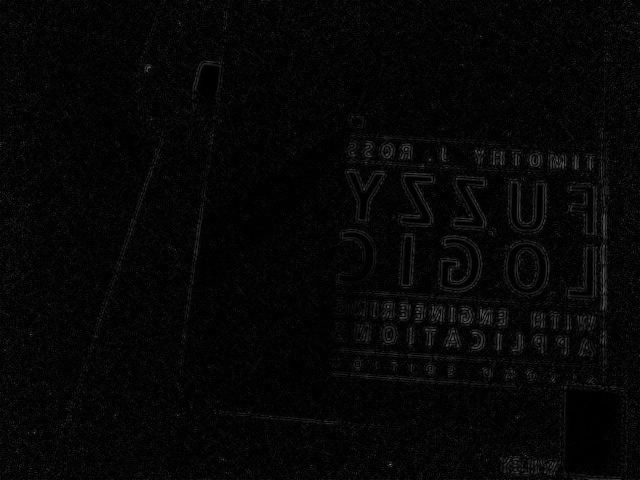
Para retormar a imagem da escala logarítmica calculou-se a exponencial da imagem e, novamente, a normalizou. Os resultados obtidos foram os seguintes:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <unistd.h>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace std;
using namespace cv;
// FILTER PARAMETERS
int gainSlider = 5;
int radiusSlider = 80;
int gammaLowSlider = 5;
int gammaHighSlider = 20;
// FILTER LIMITS
int MAX_GAIN = 1000;
int MAX_RADIUS = 1000;
int MAX_GAMMA_LOW = 1000;
int MAX_GAMMA_HIGH = 1000;
char trackbar[50];
vector<Mat> complexComponents;
Mat loadedImage, complexImage, filter;
Mat_<float> realComponent, imaginaryComponent;
int originalWidth, originalHeight;
int optimalWidth, optimalHeight;
void swapQuadrants(Mat& image) {
Mat buffer, A, B, C, D;
// se a imagem tiver tamanho impar, recorta a regiao
// para evitar cópias de tamanho desigual
// image = image(Rect(0, 0, image.cols & -2, image.rows & -2));
int cx = image.cols / 2;
int cy = image.rows / 2;
int ox = image.cols - cx;
int oy = image.rows - cy;
// reorganiza os quadrantes da transformada
// A B -> D C
// C D B A
A = image(Rect(0, 0, cx, cy));
B = image(Rect(cx, 0, ox, cy));
C = image(Rect(0, cy, cx, oy));
D = image(Rect(cx, cy, ox, oy));
// A <-> D
A.copyTo(buffer);
D.copyTo(A);
buffer.copyTo(D);
// C <-> B
C.copyTo(buffer);
B.copyTo(C);
buffer.copyTo(B);
}
void makeBorder(
Mat& image,
Mat& bordedImage,
int& actualHeight,
int& actualWidth,
int& optimalHeight,
int& optimalWidth) {
// obtem os tamanhos otimos para calculo do FFT
optimalHeight = getOptimalDFTSize(image.rows);
optimalWidth = getOptimalDFTSize(image.cols);
// realiza o padding da imagem
cv::copyMakeBorder( image, bordedImage, 0,
optimalHeight - actualHeight, 0,
optimalWidth - actualWidth,
BORDER_CONSTANT, Scalar::all(0));
// prepara a matriz complexa para ser preenchida
complexImage = Mat(image.size(), CV_32FC2, Scalar(0));
// parte imaginaria da matriz complexa (preenchida com imag)
imaginaryComponent = Mat_<float>::zeros(bordedImage.size());
}
Mat& toComplex(Mat& image) {
// cria a compoente real em escala logaritmica
realComponent = Mat(image);
realComponent += Scalar::all(1);
cv::log(realComponent, realComponent);
// limpa o array de matrizes que vao compor a imagem complexa
complexComponents.clear();
// insere as duas componentes no array de matrizes
complexComponents.push_back(realComponent);
complexComponents.push_back(imaginaryComponent);
// combina o array de matrizes em uma unica componente complexa
cv::merge(complexComponents, complexImage);
return complexImage;
}
void buildFilter(Mat& filter, int optimalHeight, int optimalWidth) {
// Cria uma matriz temporária para criar as
// componentes real e imaginaria do filtro ideal
Mat_<float> mask = Mat(optimalHeight, optimalWidth, CV_32F);
float H, W;
float gain = (float) gainSlider/10;
float gammaLow = (float) gammaLowSlider/10;
float gammaHigh = (float) gammaHighSlider/10;
float radius = (float) radiusSlider/10;
printf("\nGanho(c)/Gama(L)/Gama(H)/Raio: %.3f/ %.3f/ %.3f/ %.3f", gain, gammaLow, gammaHigh, radius);
for (int h = 0; h < optimalHeight; h++) {
for (int w = 0; w < optimalWidth; w++) {
H = h - ((float) optimalHeight / 2);
W = w - ((float) optimalWidth / 2);
mask.at<float>(h,w) = ((gammaHigh - gammaLow) * (1 - exp(-gain * ((H*H)+(W*W))/(radius*radius)))) + gammaLow;
}
}
cv::imshow("Filtro homomorfico", mask);
Mat masks[] = {mask, mask};
cv::merge(masks, 2, filter);
}
Mat& homomorphic(Mat& complexImage, Mat& filter) {
// Calcula a DFT
cv::dft(complexImage, complexImage);
// realiza a troca de quadrantes
swapQuadrants(complexImage);
// aplica o filtro frequencial
cv::mulSpectrums(complexImage, filter, complexImage, 0);
// permuta os quadrantes
swapQuadrants(complexImage);
// calcula a TRANSFORMADA INVERSA DE FOURIER
cv::idft(complexImage, complexImage);
complexComponents.clear();
// separa os componentes da imagem complexa
cv::split(complexImage, complexComponents);
// normaliza os valores dos pixels entre 0 e 1
cv::normalize(complexComponents[0], complexComponents[0], 0, 1, CV_MINMAX);
// aplica o exponencial ao componente real da imagem
cv::exp(complexComponents[0], complexComponents[0]);
// normaliza novamente os valores dos pixels entre 0 e 1
cv::normalize(complexComponents[0], complexComponents[0], 0, 1, CV_MINMAX);
return complexComponents[0];
}
void loadImage(Mat& originalImage, Mat& loadedImage, Mat& filter) {
cv::imshow("original", originalImage);
originalWidth = originalImage.cols;
originalHeight= originalImage.rows;
makeBorder(
originalImage,
loadedImage,
originalHeight,
originalWidth,
optimalHeight,
optimalWidth);
buildFilter(
filter,
optimalHeight,
optimalWidth);
}
void processSlider(int, void*) {
buildFilter(filter, optimalHeight, optimalWidth);
}
int main(int argc, char** argv) {
char key = 0;
Mat homomorphicImage;
Mat inputImage = cv::imread(argv[1], CV_LOAD_IMAGE_GRAYSCALE);
loadImage(inputImage, loadedImage, filter);
do {
homomorphicImage = homomorphic(toComplex(loadedImage), filter);
cv::imshow("Filtragem homomorfica", homomorphicImage);
sprintf( trackbar, "Gama (H) x %d", MAX_GAMMA_HIGH/10);
cv::createTrackbar( trackbar, "Filtragem homomorfica",
&gammaHighSlider,
MAX_GAMMA_HIGH,
NULL);
sprintf( trackbar, "Gama (L) x %d", MAX_GAMMA_LOW/10);
cv::createTrackbar( trackbar, "Filtragem homomorfica",
&gammaLowSlider,
MAX_GAMMA_LOW,
NULL);
sprintf( trackbar, "K x %d", MAX_GAIN/10);
cv::createTrackbar( trackbar, "Filtragem homomorfica",
&gainSlider,
MAX_GAIN,
NULL);
sprintf( trackbar, "Raio x %d", MAX_RADIUS/10);
cv::createTrackbar( trackbar, "Filtragem homomorfica",
&radiusSlider,
MAX_RADIUS,
NULL);
processSlider(radiusSlider,0);
} while ((char)waitKey(10) != 27);
// cv::imwrite("homomorfica.jpg", homomorphicImage);
return 0;
}

É possível ajustar 4 parâmetros do filtro para adequar às necessidades de correção da imagem tratada, são eles o c (ganho), o gama low (gL), gama high (gH) e o raio ou frequência de corte do filtro (D0), em inglês cutoff.
Para a imagem acima, foram utilizados os seguintes parâmetros: Ganho(c): 0.5, Gama-low (gL): 0.5, Gama-high(gH): 0.8, Raio (D0): 8. O resultado obtido atende ao esperado, corrigindo a iluminação deficiente da imagem original.
10. Canny e a arte com pontilhismo
Exercício 10 - Filtragem homomófica
O exercício 10 pede para que, utilizando programas de exemplo (''canny.cpp'' e ''pontilhismo.cpp'') como referência, fosse implementado o programa ''cannypoints.cpp'' que simule a técnica de pintura artística conhecida como pontilhismo que as imagens são compostas com pontos utilizando as bordas produzidas pelo algoritmo de Canny para melhorar a qualidade da imagem pontilhista gerada. Ao fim, descrever detalhes do procedimento usado para criar sua técnica pontilhista.
A implementação desenvolvida para a resolução do problema proposto foi o seguinte:
#include <iostream>
#include <opencv2/opencv.hpp>
#include <fstream>
#include <iomanip>
#include <vector>
#include <algorithm>
#include <numeric>
#include <ctime>
#include <cstdlib>
#include <list>
#include <random>
#include <ext/numeric>
#include <ext/algorithm>
#include <ext/functional>
using namespace std;
using namespace cv;
int threshld = 10;
int THRESHOLD_MAX = 200;
//STEP define o passo usado para varrer a imagem de referência
int step = 1;
int STEP_MAX = 8;
int jitter = 2;
int JITTER_MAX = 15;
int radius = 1;
int RADIUS_MAX = 8;
Mat cannyPoints;
Mat image, border;
void processCannyParameters(int, void*) {
int x, y;
int width = image.size().width;
int height = image.size().height;
// Determina os contornos usando os algorirmo de Canny
Canny(image, border, threshld, 3 * threshld);
imshow("canny", border);
// Limita o STEP e o JITTER a 1.
step = (step < 1 ? 1 : step);
jitter = (jitter < 1 ? 1 : jitter);
// calcula parametros fixos para otimizar a execucao
float halfSTEP = (step/2);
int oneJITTER = (jitter + 1);
int doubleJITTER = (2*jitter);
// Inicializa o vetor xrange com um ganho igual
// ... a STEP e um deslocamento STEP/2
vector<int> xrange;
xrange.resize(height/step);
for (uint i = 0; i < xrange.size(); i++) {
xrange[i] = (i * step) + halfSTEP;
}
// Inicializa o vetor xrange com um ganho igual
// ... a STEP e um deslocamento STEP/2
vector<int> yrange;
yrange.resize(width/step);
for (uint i = 0; i < yrange.size(); i++) {
yrange[i] = (i * step) + halfSTEP;
}
cannyPoints = Mat(height, width, CV_8UC3, Scalar(255, 255, 255));
// randomizacao dos elementos do range em X
random_shuffle(xrange.begin(), xrange.end());
for (auto i : xrange) {
// randomizacao dos elementos do range em Y
random_shuffle(yrange.begin(), yrange.end());
for (auto j : yrange) {
// Obtem, para cada elemento (i,j)
// ... sorteado, o ponto (x,y) da imagem.
x = (i + (rand() % doubleJITTER) - oneJITTER);
y = (j + (rand() % doubleJITTER) - oneJITTER);
// Desenha um circulo de raio RAIO da mesma cor do ponto (x,y)
// ... da imagem. Observe o 'swap' dos valores BGR para RGB
circle( cannyPoints,
cv::Point(y, x),
radius,
CV_RGB(
// Obtem a cor do ponto (x,y) da imagem.
(int)(image.at<Vec3b>(x,y)[2]),
(int)(image.at<Vec3b>(x,y)[1]),
(int)(image.at<Vec3b>(x,y)[0])),
-1,
CV_AA);
}
}
// Desenho dos pontos da borda da imagem para
// ... realce das bordas da imagem pontilhista gerada
for (int i = 0; i < height; i+=2 ) {
for (int j = 0; j < width; j+=2) {
if (border.at<uchar>(i, j) > 0) {
circle( cannyPoints,
cv::Point(j,i),
radius/2,
CV_RGB(
(int)(image.at<Vec3b>(i,j)[2]),
(int)(image.at<Vec3b>(i,j)[1]),
(int)(image.at<Vec3b>(i,j)[0])),
-1,
CV_AA);
}
}
}
imshow("Canny", cannyPoints);
}
int main(int argc, char**argv) {
image = imread(argv[1], CV_LOAD_IMAGE_COLOR);
namedWindow("Canny", 1);
cvMoveWindow( "Canny", image.cols, 0 );
createTrackbar("LIMIAR", "Canny",
&threshld,
THRESHOLD_MAX,
processCannyParameters);
createTrackbar("PASSO", "Canny",
&step,
STEP_MAX,
processCannyParameters);
createTrackbar("JITTER", "Canny",
&jitter,
JITTER_MAX,
processCannyParameters);
createTrackbar("RAIO", "Canny",
&radius,
RADIUS_MAX,
processCannyParameters);
processCannyParameters(threshld, 0 );
imwrite("canny.jpg", cannyPoints);
do {} while ((char)waitKey(10) != 27);
return 0;
}Abaixo temos as imagens original e processada, resultado do processamento com a técnica pontilhista desenvolvida.
|
Tip
|
Foram usados os seguintes parâmetros no processamento das imagens: Limiar=8, Passo=1, Jitter=2, Raio=2. |

Observou-se que 'pontos' gerados com círculos de raio muito grande geravam uma marcação artificial dos contornos da imagem. Assim, optou-se por reduzir o raio dos círculos pela metade assim como a frequência dos pontos desenhados, também pela metade.


Ressaltamos a característica de semelhança com uma pintura aplicando a técnica simulada sem, entretanto sobrecarregar com pontilhado as bordas da imagem e mantendo a similaridade desejada.